
移動自主機器人( AMR )是當前在許多業界廣泛被導入的技術,尤其在工廠與倉儲被作為物件輸送重要的自動化幫手, NVIDIA 在 COMPUTEX 2023 宣布推出全新的 Issac AMR 平台,將先進的測繪、自主移動與模擬功能導入移動機器人,同時也將開放早期客戶搶先體驗,另外也將推出 Nova Orin 架構參考機器人供評估。
Issac AMR 平台可用於模擬、驗證、部署、最佳畫與管理自主移動機器人,也包括邊際到雲端的軟體服務、運算,與一套參考感測器與硬體,希冀能加速開發與部屬自主機器人的時程,並減少成本與縮短上市時間。
Issac AMR 改善傳統需為每具機器人從頭開始撰寫自主導航程式的複雜性, Issac AMR 能夠繪製地圖、自主移動與模擬,同時能將設計後的 AMR 結合現有工作流程、機器人管理與倉管。
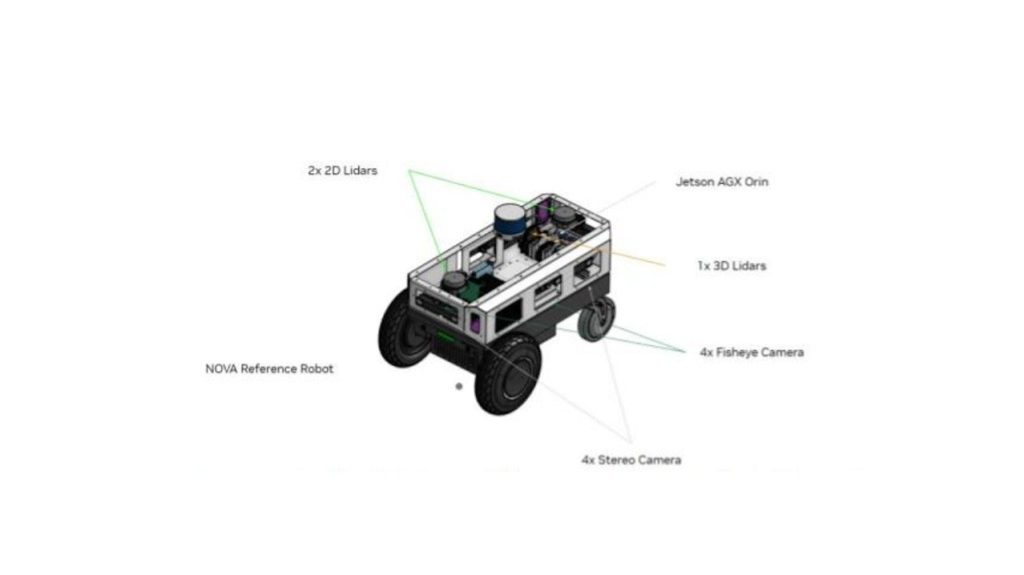
▲ Issac AMR 是將 NVIDIA Nova Orin 參考架構作為基礎
Issac AMR 是建立在 NVIDIA Nova Orin 的參考架構基礎,具備包括立體攝影機、雲演攝影機、 2D 與 3D 雷達以及 NVIDIA Jetson AGX Orin 運算核心,開發者能在 Issac AMR 環境進行 Nova Orin 參考設計的評估,後續可透過 Nova Orin 參考機器人硬體在環境中進行進一步的評估與驗證。
透過 Issac AMR 與 DeepMind 的雲服務,能夠加快大型環境度圖繪製與語義理解,將原本需數周的地圖繪製縮減為數日,並具備公分級的精度,以及產生豐富的 3D 素體圖,作為多種 AMR 建立佔據圖與語義圖。
同時, Issac AMR 可使用 NVIDIA cuOPT 的多模式導航與雲端機器人隊伍最佳化提供自主移動能力,透過一個加速與模組化的框架提供攝影機與光達的即時感知能力,利用先進的路徑規劃器、行為規劃器與語義資訊進行規劃與控制,使機器人在複雜環境自主運行;利用低程式碼、無程式碼介面,能簡化快速開發與自訂不同場景與使用案例應用程式的作業。
最終, Issac AMR 借助 Issac Sim 提供於 NVIDIA Omniverse 製作出精準符合物理原則的模擬內容,並建構出實體環境的數位孿生,在佈署到實際環境前為客戶開發、測試與量身打造機器人應用程式,減少佈署的成本與複雜性。









暂无评论内容